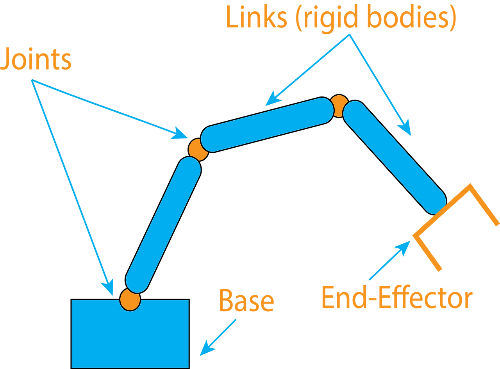
로봇팔의 궤적 계획을 위한 기구학(kinematics), 충돌 간섭 체크, 패스 플래닝, 시간적 개념을 추가한 궤적 생성 등 여러 중요한 개념들을 MATLAB에서 다시 다뤄보려고 합니다. 이 포스팅에서는 각각의 개념을 이해하고, 어떻게 MATLAB을 활용하여 로봇팔의 궤적을 계획할 수 있는지에 대해 자세히 설명합니다.1. Forward/Invers Kinematics (전진/역방향 기구학)로봇팔을 설계하고 제어하는 데 있어 "기구학(Kinematics)"은 필수적인 개념입니다.이는 로봇 팔의 End-Effector Pose(엔드 이펙터의 위치와 자세)를 목표로 Joint Angles(조인트 각도)를 결정하거나, 그 반대의 작업을 할 수 있게 해줍니다. 이를 통해 로봇이 목표 지점에 정확히 도달할 수 있습..