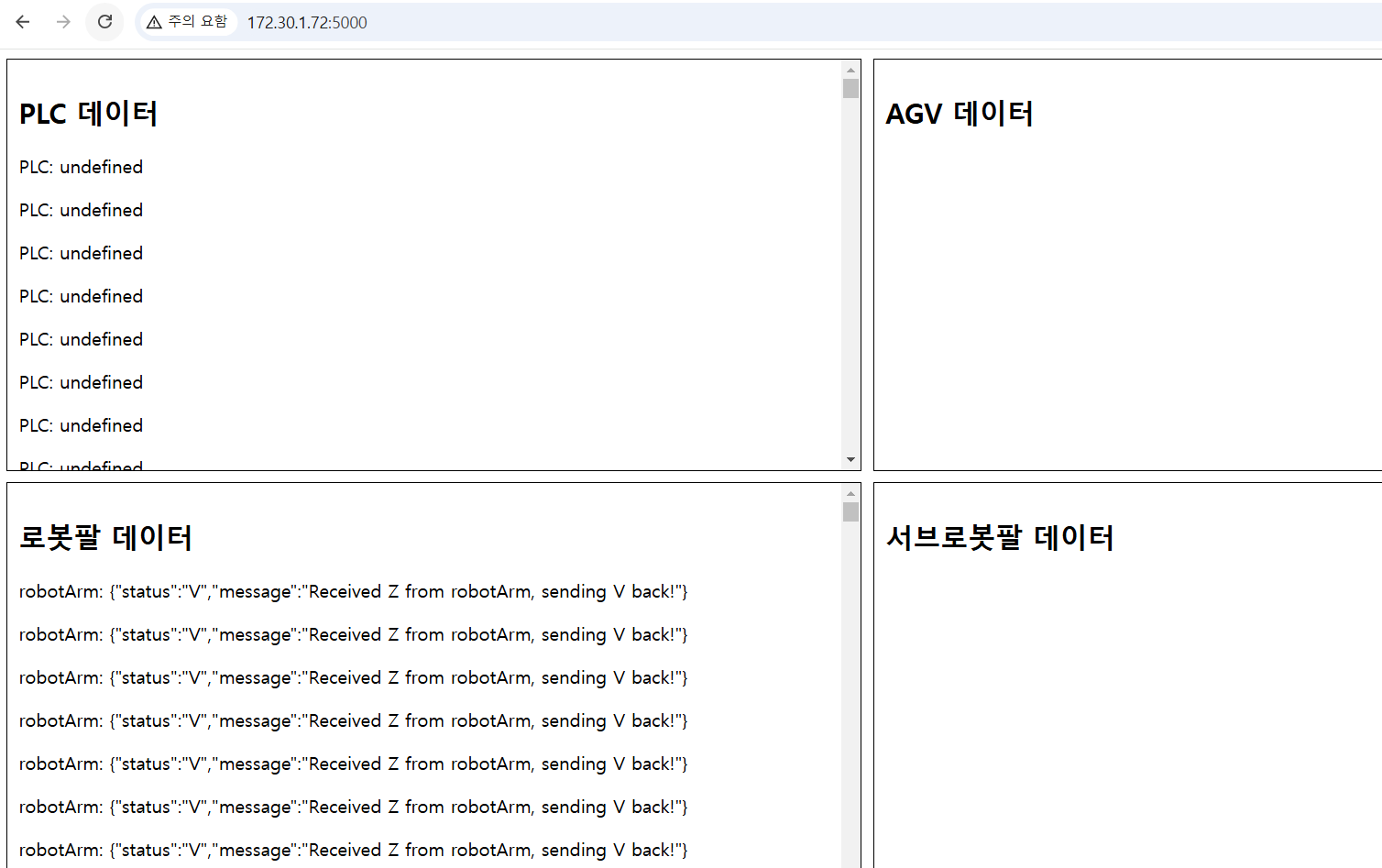
🔧 시스템 구조우리는 Flask 서버를 활용하여 **PLC(Programmable Logic Controller)**와 로봇팔 간의 동작을 제어하는 시스템을 만들고 있습니다. 이 시스템은 Flask 서버를 통해 PLC 데이터를 수신하고, 그 데이터를 바탕으로 로봇팔을 제어하는 방식으로 동작합니다.💻 시스템 흐름:PLC → Flask 서버: PLC에서 Flask 서버로 데이터를 전송Flask 서버 → 로봇팔 제어: Flask 서버에서 받은 데이터를 이용해 로봇팔을 동작시킴🖥️ Flask 서버의 역할Flask 서버는 웹 서버로서, 사용자가 웹 페이지에서 요청을 보내면 이를 처리하여 로봇팔의 동작을 제어합니다.웹 페이지에서 데이터를 받아 처리하고, 그에 따라 로봇팔을 움직이는 방식입니다.🌐 HTML 출..