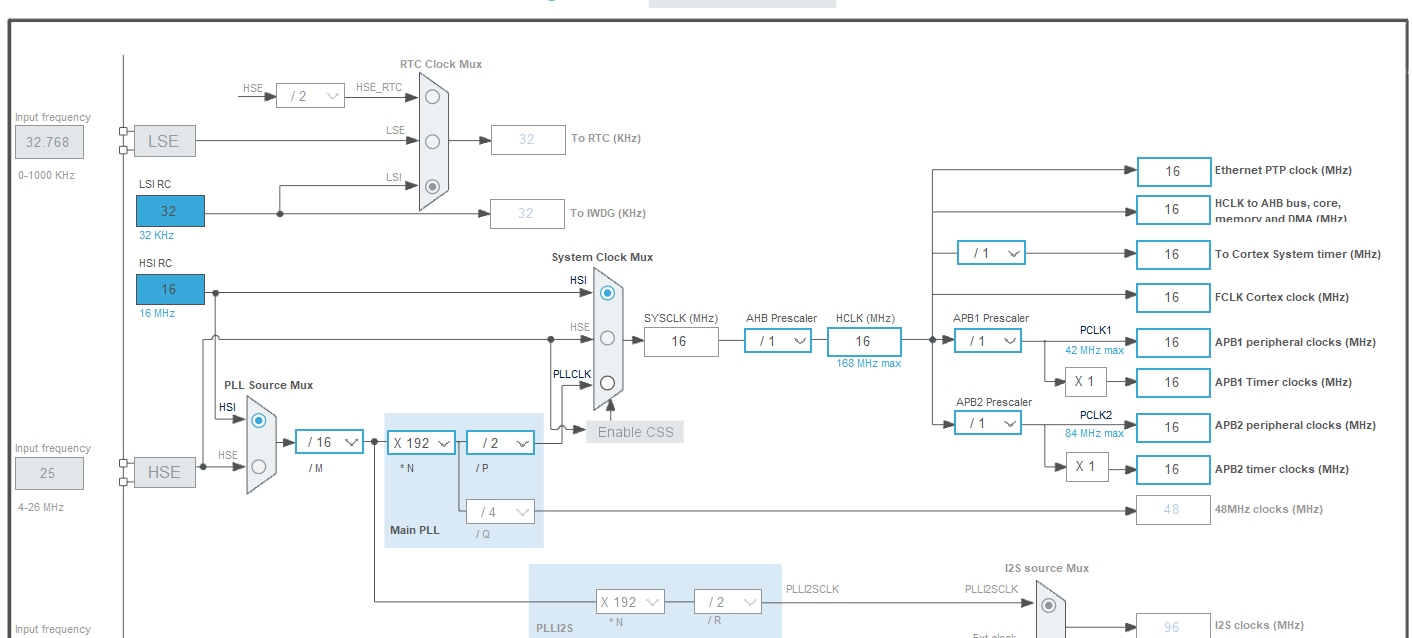
RCC, NVIC, 클럭, 프리스케일러, 주기, HSE 완벽 정리!안녕하세요! 여러분의 STM32CubeMX 활용을 더욱 쉽게 도와드리기 위해, 중요한 설정 항목들을 쉽게 이해할 수 있도록 정리해봤습니다. 🚀 여러분이 이 글을 읽고 나면, STM32CubeMX에서 클럭, 인터럽트, 타이머 설정을 완벽하게 다룰 수 있을 거예요! 🧩 1. RCC (Reset and Clock Control)RCC는 STM32 마이크로컨트롤러에서 가장 중요한 역할을 하는 모듈로, 클럭과 리셋을 관리합니다. 시스템의 성능과 효율성을 높이는 데 필수적이죠! 🔧💡🔑 주요 기능:클럭 소스 설정: 시스템이 동작하는 속도를 결정하는 핵심입니다. 🕹️PLL(Phase-Locked Loop) 설정: 클럭의 속도를 더 높이고, 정..